· Allison Keil · Projects · 2 min read
O.A.S.I.S Autonomous Rover
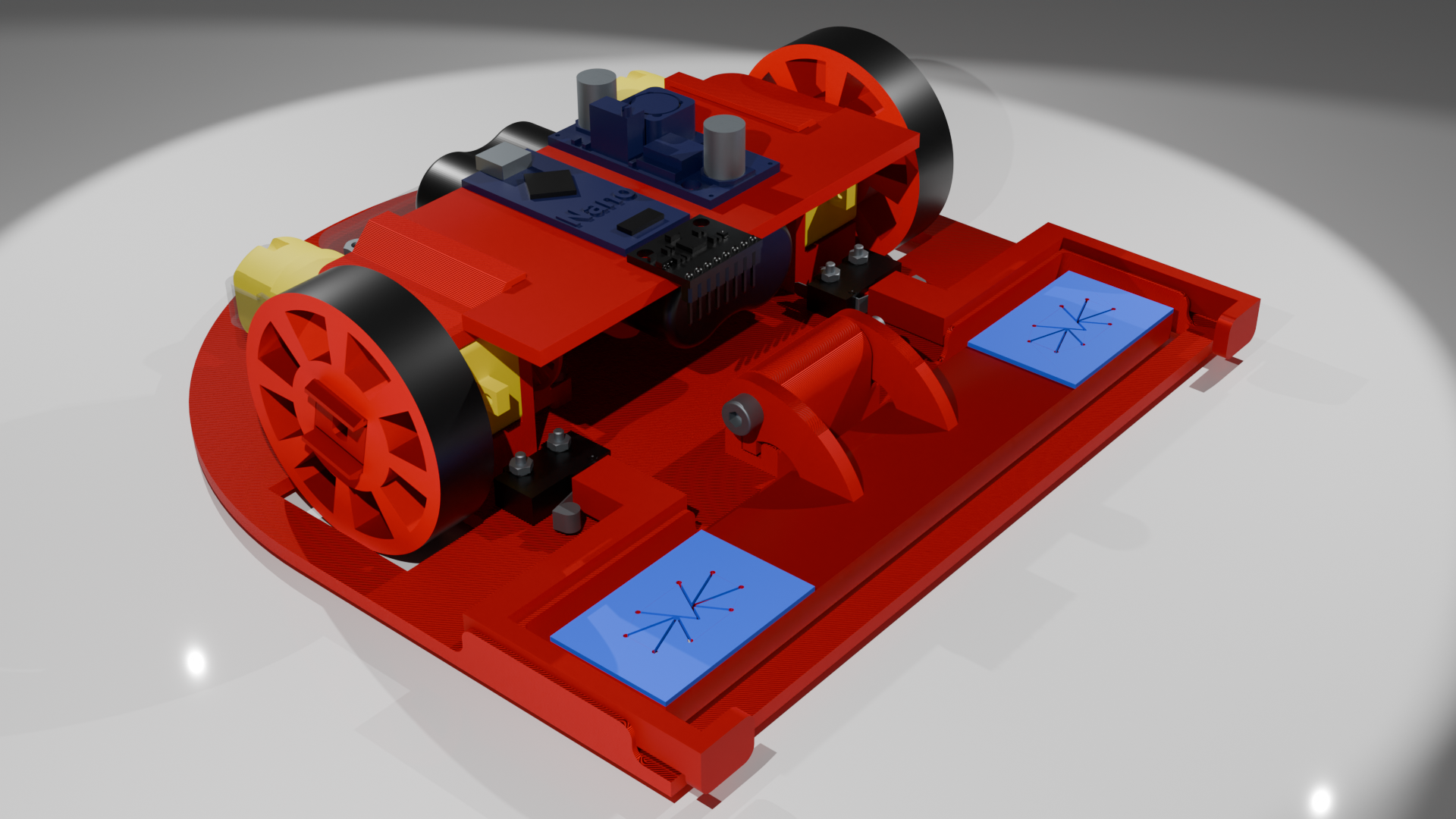
Small autonomous rover that can wander and avoid obstacles
O.A.S.I.S. stands for Obstacle Avoidance System with Integrated Sensing. A team of Bradley university Junior and Freshman electrical engineering students worked together to bring this project to completion during the 2025 spring semester. With only an idea and some scrapped parts, the O.A.S.I.S. team was able to meet their main goals: redesign the rover, build it, program an obstacle detection/avoidance system, and create an RC mode for testing.
The purpose of this course, ECE 398 (Vertically Integrated Project) is to encourage students to learn from each other. Every person on the O.A.S.I.S. team had unique skills and experiences to bring to the table. Team members came in with a passion for learning and the determination to make things work.
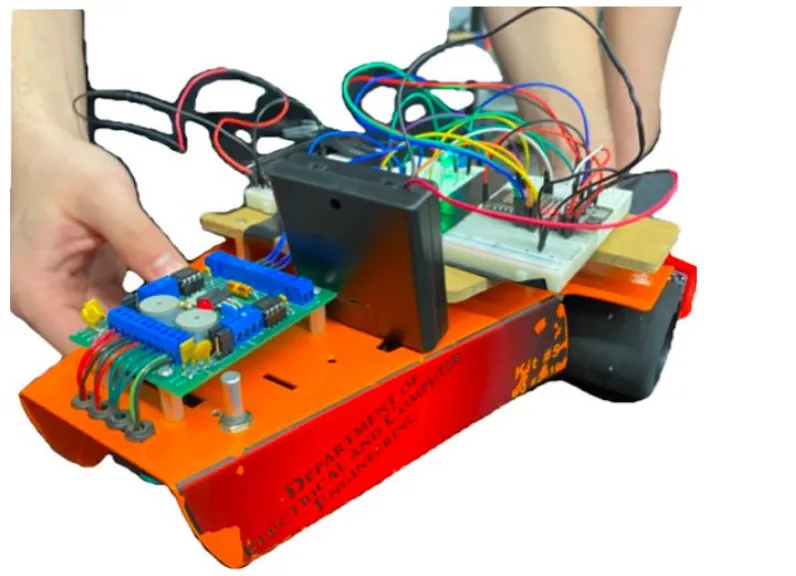
The team chose to use an ESP32 for this project. These microcontrollers are able to use Wi-Fi and Bluetooth features. The team used these features to connect a PS4 controller to the rover, so that users can switch between autonomous (obstacle-avoidance) mode and RC mode.
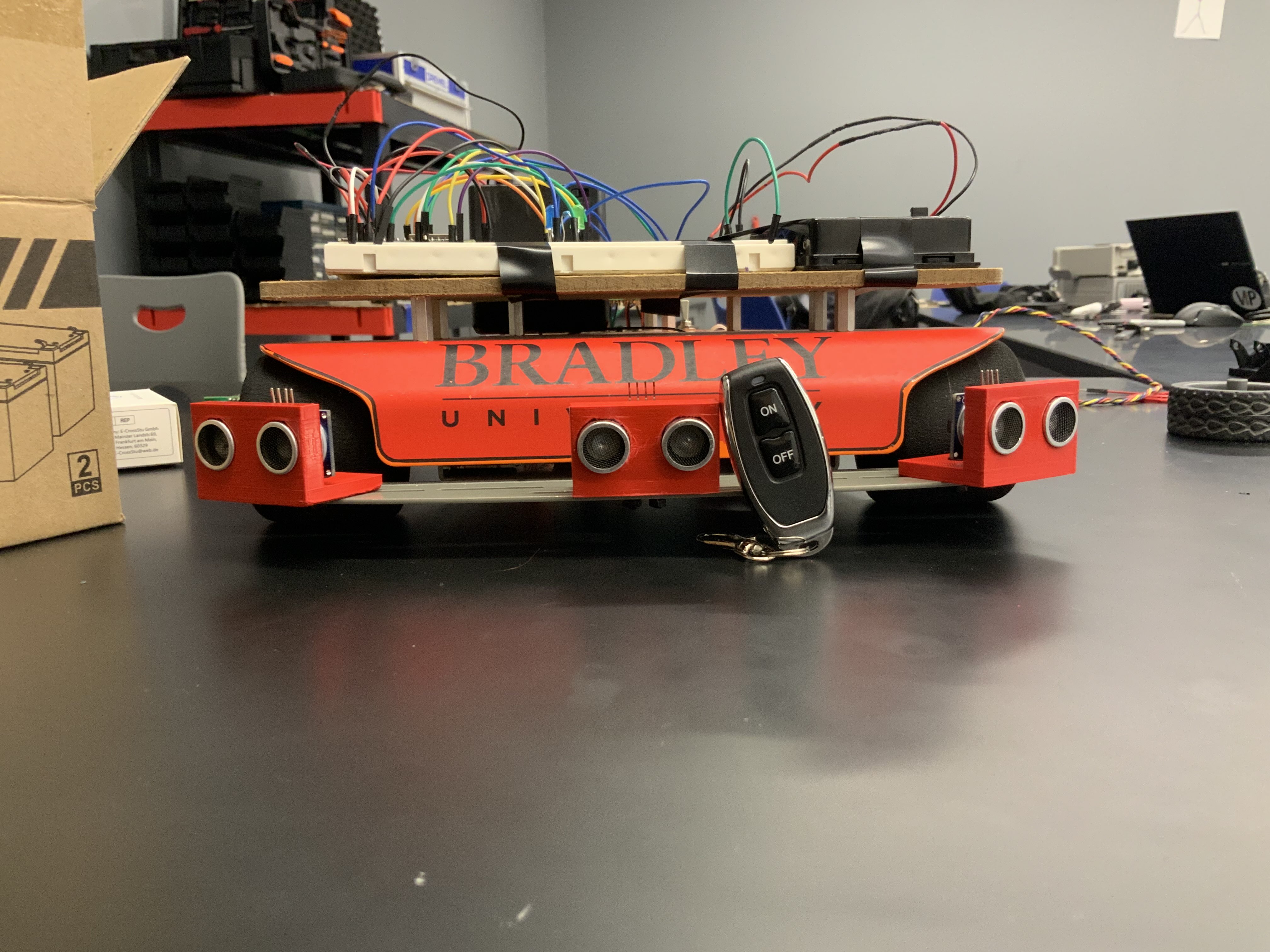
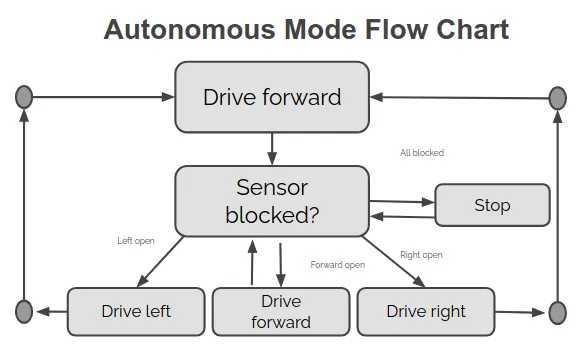
On the front of the rover, there are three ultrasonic sensors. These detect obstacles as O.A.S.I.S. roams in autonomous mode. The left and right sensors are angled outward for better obstacle detection. The rover has been programmed to take in data about where an obstacle has been detected; it uses this information to avoid obstacles effectively.
O.A.S.I.S. also has two DC motors that can turn in different directions or speeds to make turns. The team used an H-bridge chip for motor control.