· Riley Prentice · Projects · 4 min read
Sunflower
Self-sufficient Solar Tracking System
The transition to green energy is vital, adn solar panels are a key part of this effort. However, solar panels are most effective when precisely aligned with the sun. Addressing this challenge requires a way to automatically detect the direction of maximum sunlight and adjust the panels accordingly.
The Bradley University Sunflower team set out to solve this issue.
System Block Diagram
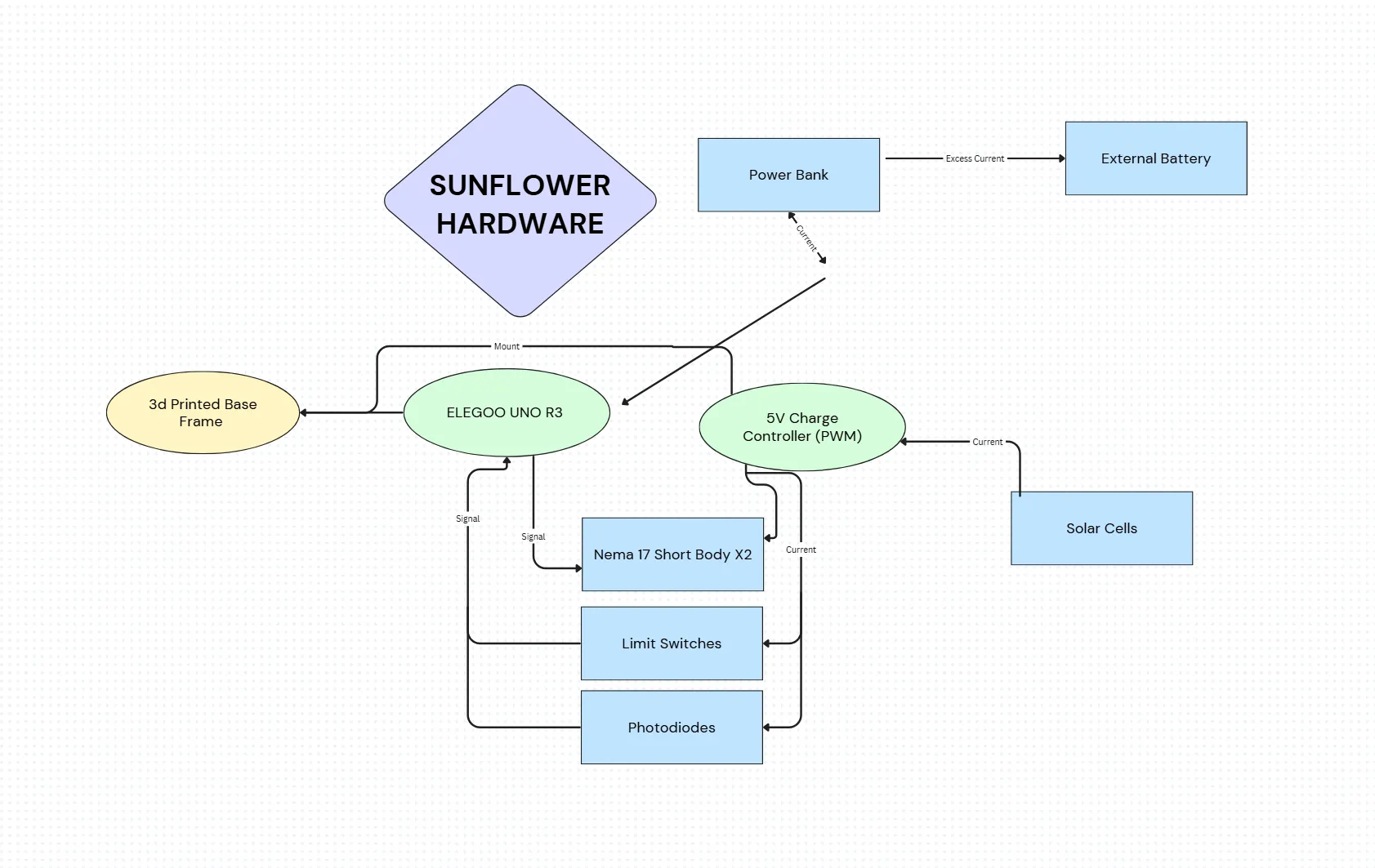
The Bradley University Sunflower project was developed to create a solution to this alignment problem by designing a robot that tracks the sun adn adjusts solar panels for optimal efficiency.
Control
Elegoo Uno R3

The Elegoo UNO R3 acts as the main controller for the robot; this is the device that runs the code and communicates via signals through the pins to the rest of the hardware. It takes in the resistance values from the photoresistors and communicates with the motors to rotate the solar panels through a Pulse Width Modulation (PWM).
Sensors
To accurately track the Sun, the system relies on an array of photoresistors.
BOJACK Photoresistors

The project utilizes BOJACK 5 mm GM5539 GL5539 photoresistors, which are used to detect sunlight. A photoreceptor changes its amount of resistance based on the amount of light. When the intensity of light on its surface increases, its resistance decreases, and vice versa. Using an array of them, it is possible to approximate the Sun’s position based on differences in the output resistance. When all the photoresistors have similar values, the panels will be in the most optimal position for sunlight.
Power
One of the main goals of Sunflower is to produce more power than it needs to operate.
Solar Cells

The 5V solar cells are used to collect the energy from the sun. Each Retisee Small Solar Cell operates at 5V and 60ma. They are simple one-cell solar units that output 5V. There are 30 of these solar cells located on the Robot. 5 on each of the petals. They are wired in parallel, which keeps the 5V but combines the current from each panel.
DFRobot DFR0559 5V Charge Controller

A DFRobot DFR0559 5V charge controller will convert the energy produced by the solar cells into usable energy for the system. It will also be able to direct current to either the battery or to the motor controller for movement.
Battery Storage


Excess power produced by the solar cells is stored in an EnergyQC 42000mAh Portable Charger. Additionally, a 3.7V Lipo Battery is hooked up as a safeguard to the charge controller, ensuring we can convert energy continuously and seamlessly since the charge controller cannot be powered by the sun exclusively.
Movement
HiLetgo DRV8825 Stepper Motor Driver
The HiLetgo DRV9925 motor driver is responsible for controlling the two servo motors. It takes the PWM signal from the microcontroller and uses it to control the angle of the servos.
Nema 17 Stepper Motor with Worm Gear

A Nema 17 stepper motor with an attached worm gear will provide the tilt motion of the solar panel array. The worm gear that is mounted to the motor provides a 1:17 reduction gear ratio to increase the torque of the shaft. It is controlled by the motor controller.
Nema 12 Short Body Stepper Motor
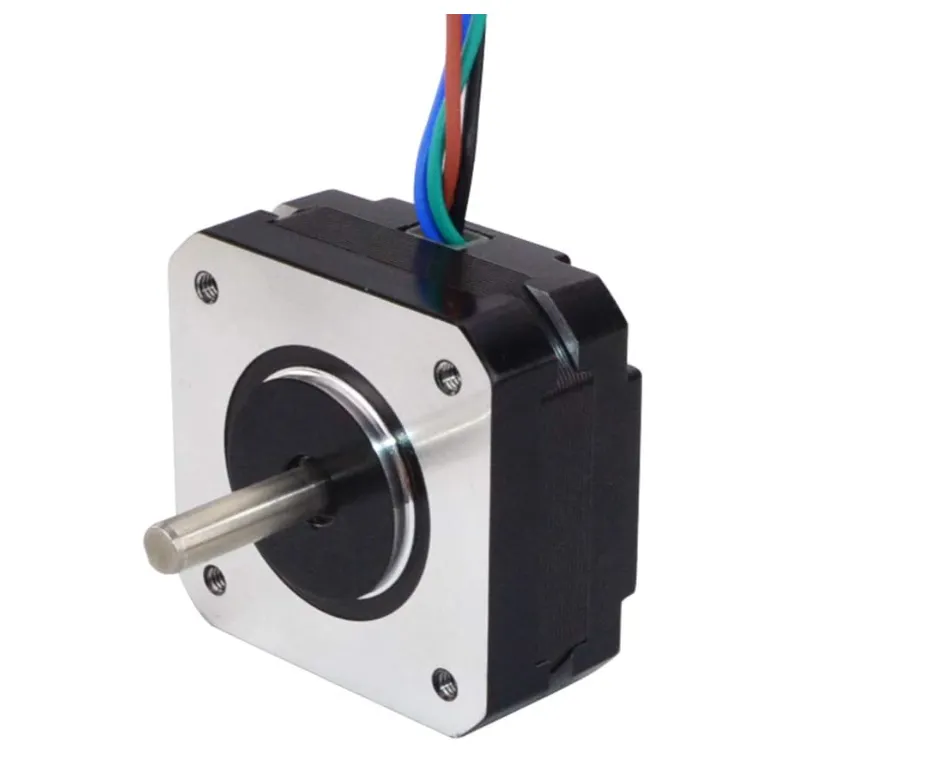
The secondary motor, a Nema 17 short body motor, will be responsible for rotating the entire apparatus, which includes the solar panel array and the motor for tilt angle. It is a 4-wire motor and is controlled through the motor controller.
Transmission Components

A GT2 Timing Belt (16 Tooth) will help with the interaction between the sprocket and the Nema 17 Short Body. The belts will be on sprockets forming a 1:2 ratio for max torque. The system uses an 8mm Coupling to connect the Nema 17+ Worm Gear to the 8mm shaft, and 24pc 4mm Standoffs to keep the motors firmly in place.
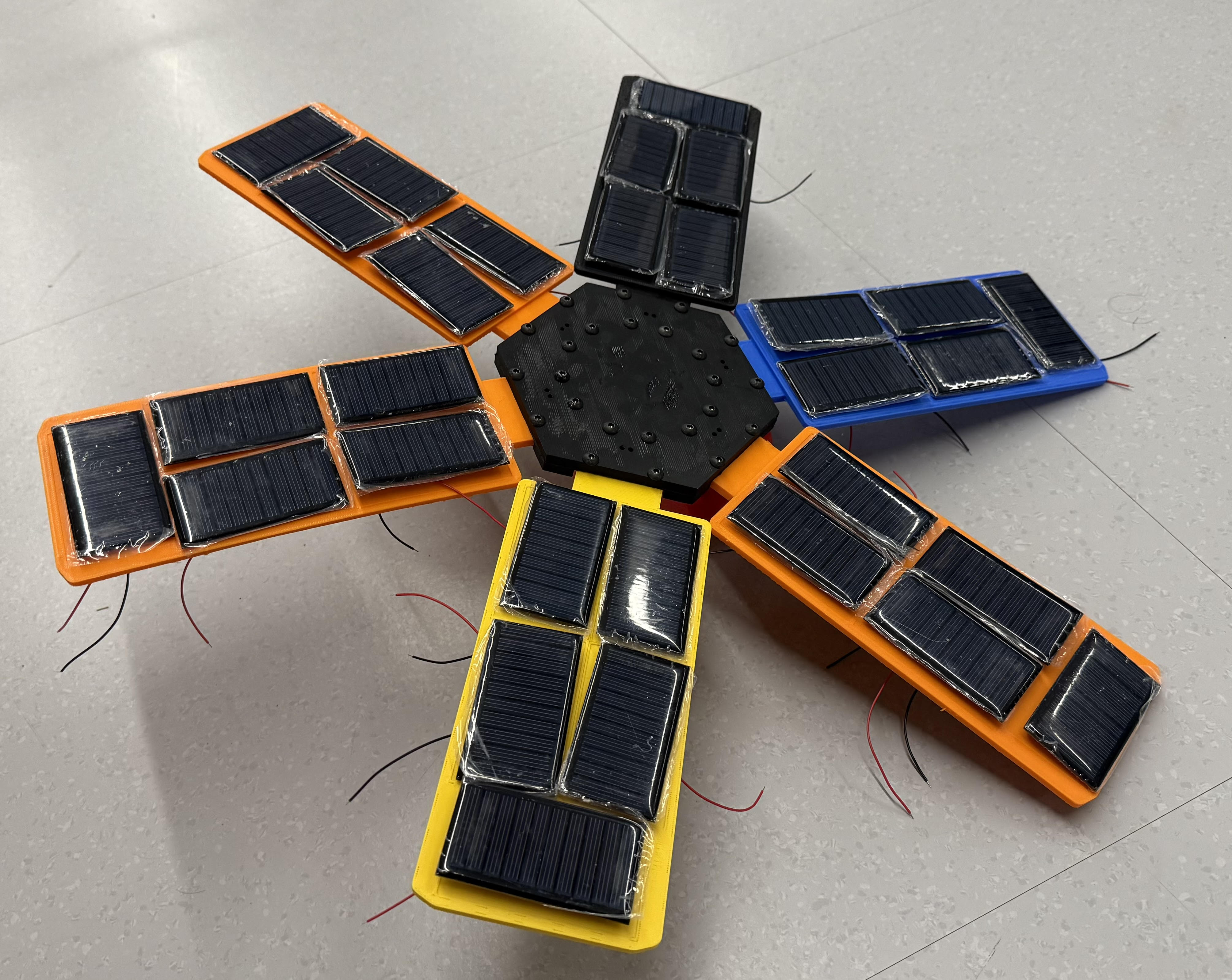
Frame
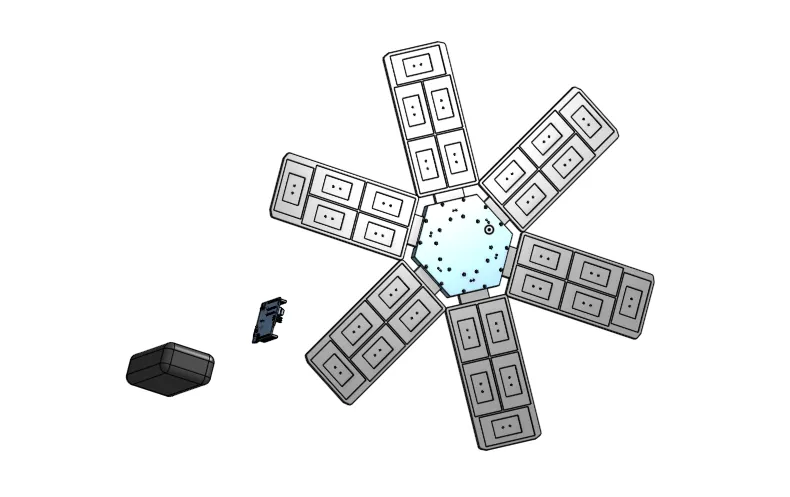
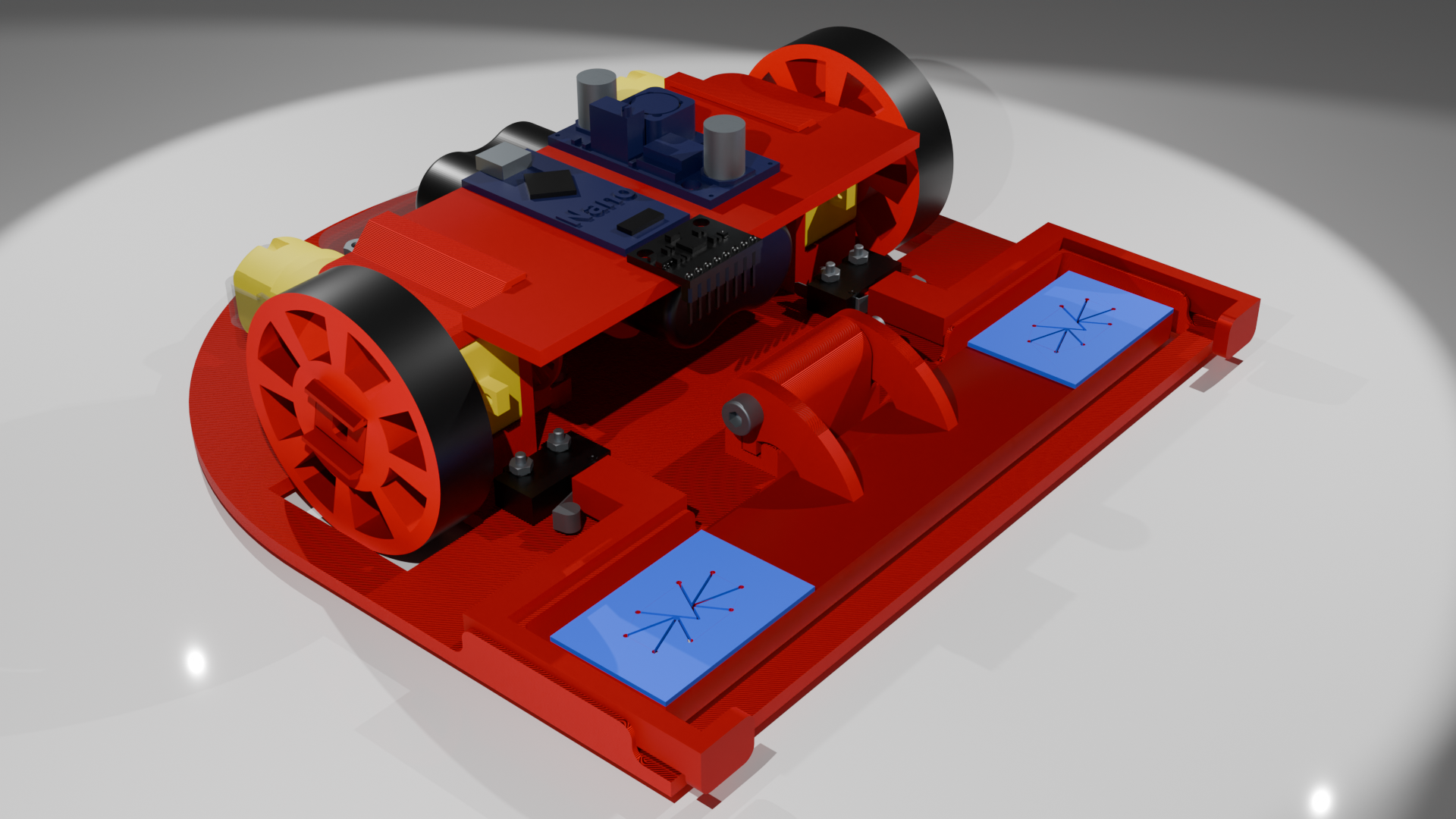
The main structure of the project is conceptualized in OnShape. It maintains a central hub that contains the photoresistors. Then the 6 flower petals house the solar cells. Below this, the two motors are mounted to change the angle and rotation of the unit.
Cost
As of the current iteration, the total cost for the bill of materials is $230.40.
Potential Improvements
- More direct sun locating design.
- Have the head of the structure be foldable for ease of storage and damage reduction.
- Create a larger system that can handle higher voltages.